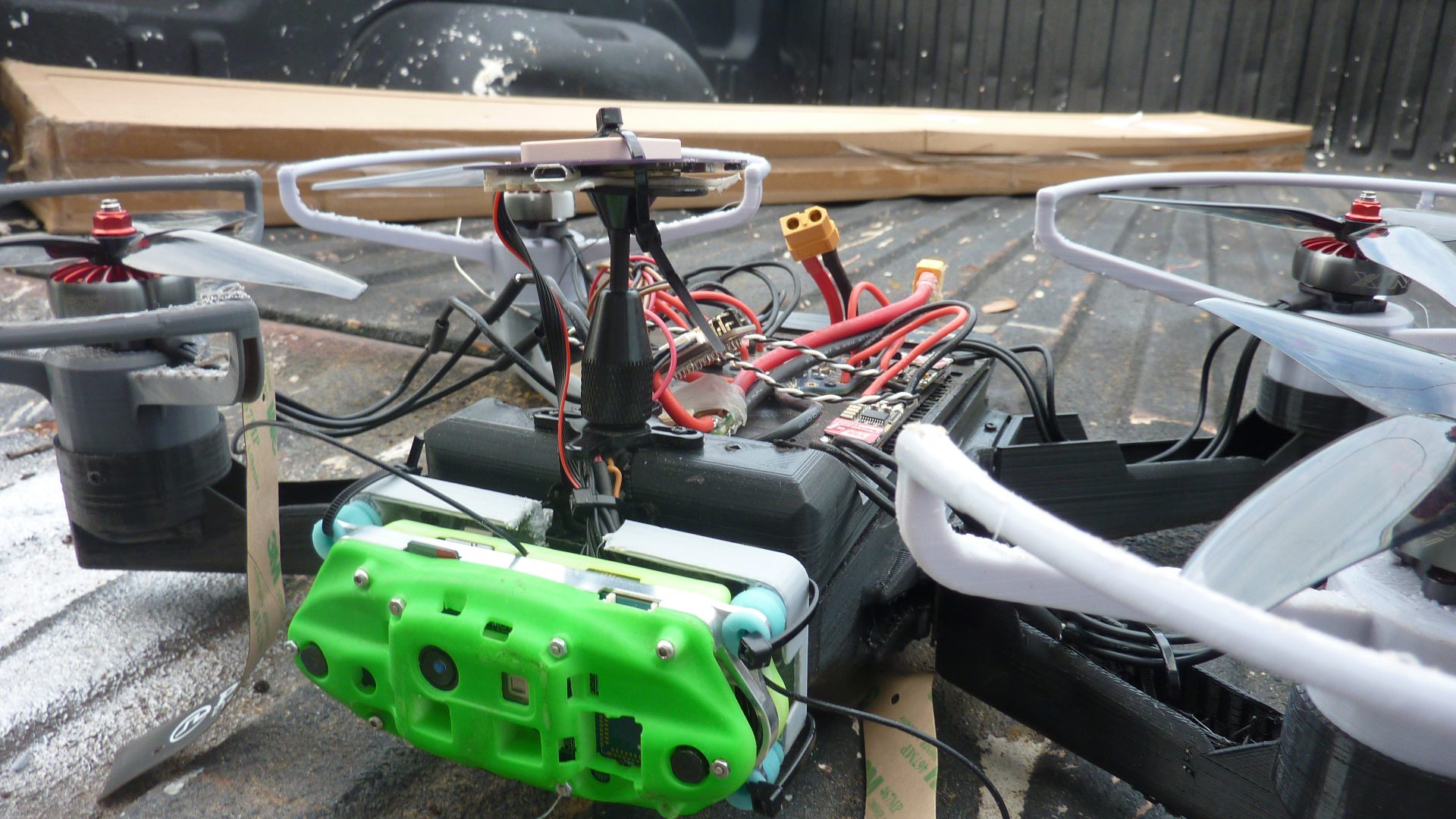
Getting close to test flights of this 80% Rooster print. Seeing some issues but just doing quick fixes so I can continue. GPS gets great lock, Radio connection is good but the GCC WiFi drops regularly so will have to figure that out. Also the VOXL gets HOT so will configure a fan that blows up from the bottom. The power distribution board has 12v supply. Looks like there will be a few hours of confidg and setup before first flight but it’s getting closer
Our decision to develop with the VOXL setup was because it enabled us access to advanced sensors and video capabilities in a single package. We wont sugar coat it, this setup is a bitch and getting it to function is like walking in the dark. Lets just say this is not Plug and Play but as a learning tools it is very advanced. If they can bring the price down 50% it would be exceptional as a technical instructional device.
Linux, Docker, Yucto, pipes, streams, TOF, it all needs to be covered in detail and time is required with some deep learning. The reward, you get to go on to their new board that has a lot more capabilities and better video options
Daytona Drone 3d printed airframe design. 80% of orignal frame size. This frame size is perfect for the VOXL, we designed a VOXL to airframe mount and will be incorperating a fan and ducting because this thing gets hot fast!



















VOXL Capabilities
Smart Autonomy
Best-in-Class Software Features
- Powered by VOXL companion computer
- Integrated Qualcomm Snapdragon 821 premium tier chipset onboard: 4 cores up to 2.4 GHz, 14nm, 4GB LPDDR4 PoP 1866MHz
- Open source software: Open CV, ROS, Docker, PX4
- Optional 4G for cellular carrier based networks
Powered by VOXL CAM Perception Engine
- PMD Time of Flight (ToF) module for indoor depth mapping
- LiDAR-like data in the forward direction
- 224 x 171 (38k) px
- FOV (H x V) 117° x 117° (near field 100° x 80°)
- Stereo Image Sensor pair for outdoor depth mapping
- Tracking Image Sensor for Visual Inertial Odometry localization